Please see attached question. Can it be completed on a word/ excel document please and show any working out. Thank you for looking at my question
Investigate and summarise (with supporting evidence) the architecture, features and differences between the PIC 16F690 and Amtel ATtiny2313 of microprocessor and highlight with diagrams, their key characteristics and principles of operation (500 words)
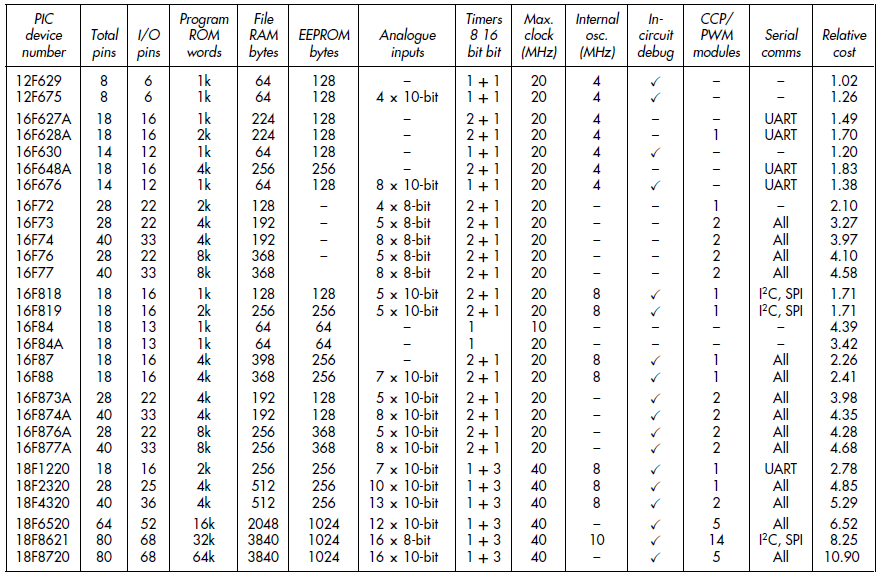
A robot has five motors which are PWM driven with an analogue position sensor on each axis. Select two cost effective PIC microprocessors from any of the tables below which could be used as a controller for the robot positioning system. Download their data sheets and draw a block diagram for the system, identifying the pins which could be connected to the motors and sensors. Briefly explain why you selected these specific devices for the task
| Device number | 16F84A | 16F628A | 16F88 | 16F690 |
| Pins | 18 | 18 | 18 | 20 |
| Ports (bits) | A (5), B(8) | A (8), B (8) | A (8), B (8) | A (6), B (4), C (8) |
| General Purpose RAM (bytes) | 68 | 224 | 368 | 256 |
| Program ROM (words) | 1 k | 2 kk | 4 k | 4 k |
| EEPROM (bytes) | 64 | 128 | 256 | 256 |
| On-chip peripherals | 1 timer | 3 timers 2 comparators Capture/compare Internal oscillator | 2 timers AD converter 2 comparators Capture/compare Internal oscillator USART | 3 timers AD converter 2 comparators Capture/compare Internal oscillator USART, SSP, I2C |
Assessment 1 (of 2)



