My name is Yagnik Vadi so my question is 35 in both table.
Humber College MECH 212 
RMB
This is graphic and analytical assignment.
You will work on 2 common types of mechanism, a four bar linkage and a slider.
The kinematic diagram is given. You must use a proper scale for drawing and the instant centers.
Four bar linkage table O2O4 = 800 mm
| No. | O2A | AB | AM | O4B | φ° |
| 1. | 200 | 580 | 300 | 710 | 20 |
| 2. | 210 | 600 | 840 | 710 | 45 |
| 3. | 200 | 600 | 400 | 480 | 60 |
| 4. | 320 | 980 | 200 | 620 | 130 |
| 5. | 300 | 970 | 1200 | 615 | 100 |
| 6. | 220 | 590 | 720 | 700 | 30 |
| 7. | 300 | 1100 | 520 | 610 | 50 |
| 8. | 220 | 620 | 800 | 680 | 120 |
| 9. | 320 | 1000 | 800 | 590 | 150 |
| 10. | 300 | 800 | 100 | 600 | 30 |
| 11. | 200 | 600 | 400 | 500 | 45 |
| 12. | 240 | 600 | 250 | 700 | 150 |
| 13. | 300 | 760 | 500 | 500 | 70 |
| 14. | 210 | 630 | 320 | 650 | 60 |
| 15. | 200 | 580 | 300 | 710 | 60 |
| 16. | 210 | 600 | 840 | 710 | 30 |
| 17. | 200 | 600 | 400 | 480 | 40 |
| 18. | 320 | 980 | 200 | 620 | 50 |
| 19. | 300 | 970 | 1200 | 615 | 60 |
| 20. | 220 | 590 | 720 | 700 | 70 |
| 21. | 300 | 1100 | 520 | 610 | 80 |
| 22. | 220 | 620 | 800 | 680 | 110 |
| 23. | 320 | 1000 | 800 | 590 | 120 |
| 24. | 300 | 800 | 100 | 600 | 130 |
| 25. | 200 | 600 | 400 | 500 | 140 |
| 26. | 240 | 600 | 250 | 700 | 150 |
| 27. | 300 | 760 | 500 | 500 | 200 |
| 28. | 210 | 630 | 320 | 650 | 230 |
| 29. | 200 | 580 | 300 | 710 | 240 |
| 30. | 210 | 600 | 840 | 710 | 250 |
| 31. | 200 | 600 | 400 | 480 | 300 |
| 32. | 320 | 980 | 200 | 620 | 310 |
| 33. | 300 | 970 | 1200 | 615 | 320 |
| 34. | 220 | 590 | 720 | 700 | 330 |
| 35. | 300 | 1100 | 520 | 610 | 25 |
| 36. | 220 | 620 | 800 | 680 | 35 |
| 37. | 320 | 1000 | 800 | 590 | 45 |
| 38. | 300 | 800 | 100 | 600 | 55 |
| 39. | 200 | 600 | 400 | 500 | 65 |
| 40. | 240 | 600 | 250 | 700 | 75 |
| 41. | 300 | 760 | 500 | 500 | 115 |
| 42. | 200 | 580 | 300 | 710 | 125 |
| 43. | 210 | 600 | 840 | 710 | 135 |
| 44. | 200 | 600 | 400 | 480 | 145 |
| 45. | 320 | 980 | 200 | 620 | 155 |
| 46. | 300 | 970 | 1200 | 615 | 215 |
| 47. | 220 | 590 | 720 | 700 | 225 |
| 48. | 300 | 1100 | 520 | 610 | 235 |
| 49. | 220 | 620 | 800 | 680 | 245 |
| 50. | 320 | 1000 | 800 | 590 | 295 |
| 51. | 300 | 800 | 100 | 600 | 305 |
| 52. | 200 | 600 | 400 | 500 | 60 |
| 53. | 240 | 600 | 250 | 700 | 120 |
| 54. | 300 | 760 | 500 | 500 | 70 |
| 55. | 210 | 630 | 320 | 650 | 140 |
| No. | Student | No. |
| 1. | Abdool, Imrad M. | 37 |
| 2. | Al Nasri, Abdullah Hasan | 50 |
| 3. | Ambay, Andrei Ryan R. | |
| 4. | Antonovich, Daniil | 30 |
| 5. | Azocar, Daniel J. | 12 |
| 6. | Baksh, Abdullah Z. | 52 |
| 7. | Cerma, Andi | |
| 8. | Cerrato, Joshua J. | 31 |
| 9. | Coey, Calvin R. | 25 |
| 10. | De Asis, Martin | 20 |
| 11. | De Boer, Nickolas B. | 16 |
| 12. | Deaconu, Denis I. | 44 |
| 13. | Degama, Raj S. | 55 |
| 14. | Dibaie Irani, Atabak | |
| 15. | Do, Hoang Kiet | 15 |
| 16. | Estermann, Alexander | 38 |
| 17. | Gohil, Divyarajsinh | 19 |
| 18. | Goldbloom, Adam T. | 43 |
| 19. | Haripersaud, Kevin | 13 |
| 20. | Herreno, Andres F. | 45 |
| 21. | Herrera Bautista, Abigail | 48 |
| 22. | Jagdev, Gurbir Singh | 47 |
| 23. | Jennings, Breum | |
| 24. | Jha, Kush D. | 24 |
| 25. | Kaur, Loveneet | 18 |
| 26. | Keller, Markus | |
| 27. | Linares, Christian A. | 51 |
| 28. | Lisicki, Amadeus | 21 |
| 29. | Malaka, Lewis O. | 33 |
| 30. | Nikam, Yash L. | 42 |
| 31. | Nwamadi, Daniel E. | |
| 32. | Ospina, Eduardo A. | 23 |
| 33. | Patel, Umang Bharatbhai | 11 |
| 34. | Persaud, Ryan | |
| 35. | Pham, Nhat M. | 49 |
| 36. | Prajapati, Jaimin A. | 27 |
| 37. | Quan, Raymond | 41 |
| 38. | Saker, Youssef A. | 34 |
| 39. | Segeren, Connor | |
| 40. | Shabutdinov, Radmir | 53 |
| 41. | Siavashi, Zahra | 29 |
| 42. | Singh, Simranjeet | 14 |
| 43. | Sylvain, Miguel | 32 |
| 44. | Timer, Zachary N. | 22 |
| 45. | Ton, Peter Q. | 54 |
| 46. | Tung, Arshdeep S. | 17 |
| 47. | Vadi, Yagnik D. | 35 |
| 48. | Vo, Thong Q. | 46 |
| 49. | White Chacon, Carlos A. |

https://www.randomlists.com/random-numbers?min=1&max=32&qty=32&dup=false
Students are selected randomly.
You must handle for each exercise at least 3 sheets of paper:
The positions of mechanism.
The velocity and instant centers
The comments on the movement of the mechanism and the calculations.
Exercise Nr. 1


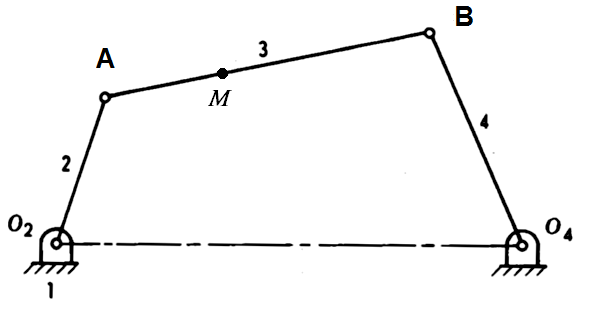
Draw the positions of this four bar linkage mechanism when:
φ = 0o, 30o, 45o, 60o, 90o, 120o, 135o, 150o, 180o, 225o, 240o, 270o, 300o, 325o, 330o and of course do not forget within between the dead positions.
Draw the path or trajectory of point M.
Comment of movement of the links of the mechanism.
Find the instant center for the given moment defined by the value of the angle φ if O2A is rotating at 120 rot/min counter clockwise
Find the Velocity of B (m/sec) using the relative velocity method and the instant center.
Find the value of angular velocity (rev/min) for the link 4 at the given moment.
Find the angular velocity (rev/min) of the ling AB for the given moment.
Find the Velocity of M (m/sec) using the relative velocity method and the instant center.
The File should be dropped at the course messages ONLY. The E-mail should be named Last Name First Name Assignment 1. (Gusho Dhimitri Assignment 1)
Every Assignment should have the cover page.
The Unit System is ISO.
All the drawing must be presented neatly and the explanation in a good technical writing.
The solution must be written clearly.
Humber College MECH 212
Slider Crank Mechanism Table
| No. | O2A | AB | AM | Offset | φ° |
| 1. | 200 | 600 | 100 | +50 | 20 |
| 2. | 210 | 510 | 140 | -60 | 45 |
| 3. | 300 | 520 | 120 | +70 | 50 |
| 4. | 210 | 540 | 120 | +80 | 30 |
| 5. | 220 | 560 | 120 | -70 | 30 |
| 6. | 220 | 600 | 200 | +60 | 120 |
| 7. | 200 | 480 | 200 | +50 | 60 |
| 8. | 220 | 600 | 200 | +40 | 120 |
| 9. | 300 | 620 | 200 | +30 | 130 |
| 10. | 300 | 500 | 200 | 150 | |
| 11. | 300 | 400 | 200 | -60 | 100 |
| 12. | 240 | 400 | 250 | -50 | 60 |
| 13. | 300 | 580 | 200 | -40 | 150 |
| 14. | 200 | 500 | 300 | -30 | 70 |
| 15. | 200 | 600 | 100 | 70 | |
| 16. | 210 | 510 | 140 | +60 | 230 |
| 17. | 300 | 520 | 120 | -50 | 240 |
| 18. | 210 | 540 | 120 | -60 | 250 |
| 19. | 220 | 560 | 120 | -70 | 300 |
| 20. | 220 | 600 | 200 | +80 | 310 |
| 21. | 200 | 480 | 200 | -70 | 320 |
| 22. | 220 | 600 | 200 | -60 | 330 |
| 23. | 300 | 620 | 200 | -50 | 25 |
| 24. | 300 | 500 | 200 | +40 | 35 |
| 25. | 300 | 400 | 200 | 45 | |
| 26. | 240 | 400 | 250 | +40 | 55 |
| 27. | 300 | 580 | 200 | -40 | 65 |
| 28. | 200 | 500 | 300 | +40 | 75 |
| 29. | 200 | 600 | 100 | -40 | 115 |
| 30. | 210 | 600 | 840 | 125 | |
| 31. | 200 | 600 | 100 | -50 | 135 |
| 32. | 210 | 510 | 140 | +50 | 145 |
| 33. | 300 | 520 | 120 | -50 | 155 |
| 34. | 210 | 540 | 120 | +50 | 215 |
| 35. | 220 | 560 | 120 | 225 | |
| 36. | 200 | 480 | 200 | +60 | 235 |
| 37. | 220 | 600 | 200 | +60 | 245 |
| 38. | 300 | 620 | 200 | -60 | 295 |
| 39. | 300 | 500 | 200 | -60 | 305 |
| 40. | 300 | 400 | 200 | -70 | 60 |
| 41. | 200 | 600 | 100 | -60 | 120 |
| 42. | 210 | 510 | 140 | -50 | 70 |
| 43. | 300 | 520 | 120 | +40 | 140 |
| 44. | 210 | 540 | 120 | 230 | |
| 45. | 220 | 560 | 120 | -40 | 240 |
| 46. | 220 | 600 | 200 | 250 | |
| 47. | 200 | 480 | 200 | -40 | 300 |
| 48. | 220 | 600 | 200 | +40 | 150 |
| 49. | 300 | 620 | 200 | 100 | |
| 50. | 300 | 500 | 200 | -50 | 60 |
| 51. | 300 | 400 | 200 | -50 | 150 |
| 52. | 240 | 400 | 250 | +70 | 70 |
| 53. | 300 | 580 | 200 | +80 | 70 |
| 54. | 200 | 500 | 300 | -70 | 230 |
| 55. | 200 | 600 | 100 | +60 | 240 |
You must handle this exercise at least 3 sheets of paper:
The positions of mechanism.
The velocity and instant centers
The comments on the movement of the mechanism and the calculations.
Exercise No. 2

Draw the positions of this slider crank mechanism when:
φ = 0o, 30o, 45o, 60o, 90o, 120o, 135o, 150o, 180o, 225o, 240o, 270o, 300o, 325o, 330oand of course do not forget within between the dead positions.
Draw the path or trajectory of point M.
Find the instant center for the given moment defined by the value of the angle φ if O2A is rotating at 360 rot/min clockwise
Find the Velocity of B (m/sec) using the relative velocity method and the instant center.
Find the angular velocity (rev/min) of the link AB for the given moment.
Find the Velocity of M (m/sec) using the relative velocity method and the instant center.
The Unit System is ISO.
All the drawing must be presented neatly and the explanation in a good technical writing.
The solution must be written clearly.




