Waiting for answer This question has not been answered yet. You can hire a professional tutor to get the answer.
Work the following problems: a. A unity feedback control systems for a robot submarine has a plant with a third-order transfer function G(s) = K / (s(s + 10)(s +50)) We want
Work the following problems:
a. A unity feedback control systems for a robot submarine has a plant with a third-order transfer function
G(s) = K / (s(s + 10)(s +50))
We want the overshoot to be approximately 7.5% for a step input and the settling time (with a 2% criterion) of the system be 400ms. Find a suitable phase-lead compensator by using root locus methods. Let the zero of the compensator be located at s = -15, and determine the compensator pole. Determine resulting Kv.
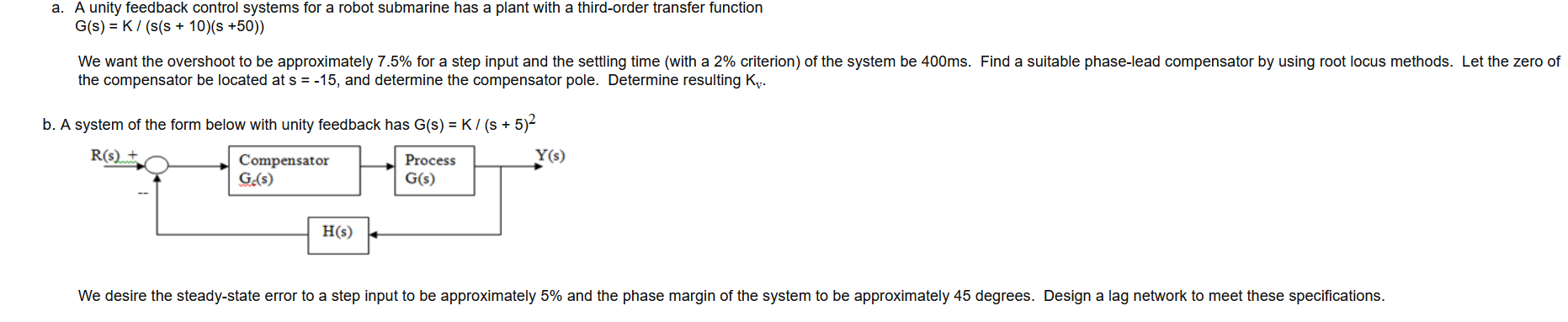
b. system of the form below with unity feedback has G(s) = K / (s+5)^2
b.We desire the steady-state error to a step input to be approximately 5% and the phase margin of the system to be approximately 45 degrees. Design a lag network to meet these specifications.
Please see attached sheet for diagram No chegg answers please!! Need Matlab code for all parts!

{kind=link}